El vector
![]() de
de ![]() , si existe se llama la DERIVADA DE LA APLICACIÓN EN EL PUNTO SEGÚN EL VECTOR .
En el caso particular de ser
, si existe se llama la DERIVADA DE LA APLICACIÓN EN EL PUNTO SEGÚN EL VECTOR .
En el caso particular de ser
![]() y
y ![]() , considerado como vector del
espacio vectorial
, considerado como vector del
espacio vectorial ![]() de dimensión 1, se tiene
de dimensión 1, se tiene
![]() , la derivada
usual de
, la derivada
usual de ![]() en el punto
en el punto ![]() . Esta circunstancia motiva la definición (1).
. Esta circunstancia motiva la definición (1).
La definición (1) conserva el sentido si ![]() . Por cierto la derivada según el vector cero siempre existe
y se verifica:
. Por cierto la derivada según el vector cero siempre existe
y se verifica:
 .
.
Así pues:
Si existe
![]() , existe también
, existe también
![]() y se verifica:
y se verifica:
Nota
Autores anglosajones dicen frecuentemente ``derivada direccional'' en vez de ``derivada según un vector''. La fórmula (2) muestra que esta terminología es incorrecta, pues
si ![]() , no es cierto que
, no es cierto que
![]() dependa solamente de la
``dirección'' de
dependa solamente de la
``dirección'' de ![]() , o sea del subespacio
, o sea del subespacio
![]() de
de ![]() de dimensión 1, engendrado por el vector
de dimensión 1, engendrado por el vector
![]() .
.
Caso de ser ![]() de dimensión finita
de dimensión finita
Supongamos
Si mantenemos fija la base
En la última circunstancia
Nota
![]() y consideremos una base
y consideremos una base
![]() de
de ![]() . Si para algún
. Si para algún
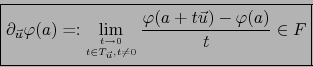
![]() existe la derivada
existe la derivada
![]() la llamaremos DERIVADA PARCIAL DE EN , DE ´iNDICE CON RESPECTO A LA BASE
la llamaremos DERIVADA PARCIAL DE EN , DE ´iNDICE CON RESPECTO A LA BASE ![]() y pongamos
y pongamos
 . Vale:
. Vale:
![\begin{eqnarray*}
\partial_{\vec{e}_i} \varphi (a) &=& \lim_{t \to 0 \atop t\ne ...
..._i\hspace{2em} \vec{e}_i + \cdots + a_n \vec{e}_n \right)\right]
\end{eqnarray*}](img3206.png)
De ahí vemos que si, mediante el referencial
![]() identificamos los puntos de
identificamos los puntos de ![]() con los
correspondientes
con los
correspondientes ![]() -uplos de sus coordenadas,
-uplos de sus coordenadas,
![]() no será otra que la derivada parcial ``usual'' (de orden 1)
de
no será otra que la derivada parcial ``usual'' (de orden 1)
de ![]() en
en ![]() ``con respecto al argumento número
``con respecto al argumento número ![]() ''.
''.
![]() nos permitiremos escribir simplemente
nos permitiremos escribir simplemente
![]() en vez de
en vez de
![]() . Esto será siempre el caso si
. Esto será siempre el caso si
![]() y
y
![]() es la base natural de
es la base natural de
![]() .
.
![]() es sensu stricto la derivada parcial usual de
es sensu stricto la derivada parcial usual de ![]() en
en ![]() ``con
respecto al
``con
respecto al ![]() -ésimo argumento''.
-ésimo argumento''.
La existencia de las derivadas
![]() aun para todo
aun para todo ![]() (a fortiori la mera existencia de todas
las derivadas parciales con respecto a una base en el caso de dimensión finita) no constituye todavía una generalización adecuada de la
derivabilidad de
(a fortiori la mera existencia de todas
las derivadas parciales con respecto a una base en el caso de dimensión finita) no constituye todavía una generalización adecuada de la
derivabilidad de ![]() en
en ![]() en el caso familiar
en el caso familiar
![]() , pues:
, pues:
La verdadera y fecunda generalización del concepto de derivada en dimensión 1 es aquél de ``diferencial'' que procedemos a definir.
![]() en
en ![]() ,
,
![]() de
de ![]() en
en ![]() no es necesariamente
lineal, como sería deseable,
no es necesariamente
lineal, como sería deseable,
![]()
![]()
![]()
![]()
![]()
Siguiente: Concepto de diferencial
Arriba: Diferenciación en espacios afines
Anterior: Diferenciación en espacios afines
Guillermo M. Luna
2009-06-14